Des temps précis dans les réseaux électriques
Synchronisation à la microseconde avec la norme CEI/IEEE 61850-9-3
La protection et la stabilité des réseaux électriques sont assurées en mesurant les courants et tensions de nombreux nœuds sur un territoire. Ces mesures sont échangées via un réseau de communication qui introduit un retard variable et significatif. Pour comparer ces valeurs, celles-ci sont estampillées avec le temps absolu de leur échantillonnage.
L’estampillage temporel des mesures de courants et de tensions réalisées en différents nœuds d’un réseau électrique requiert un temps commun d’une exactitude de quelques microsecondes. Bien que les satellites de navigation offrent un service de temps avec l’exactitude requise, une synchronisation par le réseau de communication est souvent préférée.
La CEI et l’IEEE ont donc publié la norme CEI/IEEE 61850-9-3 de synchronisation exacte à la microseconde près dans le cadre de la série de normes CEI 61850 (Réseaux et systèmes de communication pour l’automatisation des systèmes électriques). Cette norme a été formulée et réalisée en Suisse, dans le cadre d’une collaboration entre le Centre de recherche ABB à Baden, l’EPFL et la ZHAW à Winterthour.
Exigences en synchronisme
Dans les réseaux électriques, diverses applications nécessitent d’avoir recours à un temps précis. En voici quelques exemples.
Premièrement, l’enregistrement effectué par les perturbographes pour la reconstitution d’événements dans le réseau électrique exige que les mesures soient horodatées avec environ 10 ms d’écart au temps absolu. [1]
Deuxièmement, pour surveiller la stabilité du réseau électrique, chaque nœud critique contient une unité de mesure de phase (PMU, Phasor Measurement Unit) qui échantillonne les courants et les tensions et calcule leur fréquence, leur angle de phase (phaseur) et leur dérive de phase. Les PMU des différents nœuds d’un sous-réseau envoient ces valeurs par le réseau de communication à leur concentrateur de données de phaseurs (PDC, Phasor Data Concentrator). Les PDC regroupent les phaseurs et les envoient par le réseau de communication au centre de contrôle qui évalue la stabilité globale du réseau.
Le retard de transmission dans le réseau de communication longue distance n’est pas prévisible. Afin d’effectuer la concentration et la comparaison, les phaseurs sont estampillés avec l’heure exacte de la mesure. Après cela, les valeurs peuvent être extrapolées, resynchronisées et comparées. Une erreur de phase de 0,1° correspond à une erreur de temps de 5 μs. [2] Les exigences sont encore plus sévères quand les synchrophaseurs servent un réseau de distribution. [3] Les PMU requièrent une exactitude par rapport au temps absolu de quelques microsecondes.
Troisièmement, la protection différentielle des lignes à haute tension repose sur la mesure de courant aux extrémités des conducteurs. Les capteurs en bout mesurent les valeurs instantanées du courant et les envoient aux relais de protection qui en font la somme de Kirchhoff. Une somme non nulle indique un défaut à terre ou un court-circuit. La distance entre bouts de conducteurs va de quelques mètres à plusieurs kilomètres. Ces mesures ont autrefois été transmises par des lignes téléphoniques dont le retard était connu et pouvait, de ce fait, être compensé. Ces connexions téléphoniques sont désormais remplacées par des réseaux à commutation de paquets dans lesquels le retard varie considérablement. Les capteurs fournissent donc les mesures avec l’heure exacte de leur échantillonnage, ce qui permet au relais de protection d’extrapoler les valeurs pour en faire la somme en un point précis du temps. La protection différentielle nécessite aussi une exactitude relative de quelques microsecondes.
Quatrièmement, la protection du jeu de barres repose sur le même procédé que la protection différentielle, sauf que le nombre de points d’extrémité est beaucoup plus élevé et les distances plus courtes, une centaine de mètres tout au plus. La protection du jeu de barres requiert également une exactitude relative de quelques microsecondes.
Cinquièmement, la localisation des défauts repose sur le fait qu’une perturbation se propage à une vitesse constante sur les conducteurs. En mesurant l’écart entre le temps d’arrivée d’une perturbation à plusieurs endroits, un détecteur localise le lieu du défaut. Cette localisation requiert, elle aussi, une exactitude relative de quelques microsecondes.
Méthodes de synchronisation
Le réseau électrique a toujours été lié à la distribution du temps. Depuis plus de 80 ans, les horloges synchrones (horloges filles) comptent sur une fréquence de réseau d’exactement 50 Hz, ou plus précisément, sur le fait qu’en fin de journée, le nombre de périodes ait été de 4'320'000 (= 24 x 3600 x 50). Pour cela, on accélère ou ralentit les générateurs. La précision de cette transmission de fréquence est cependant insuffisante pour l’automation.
Les émetteurs radio diffusent le temps depuis plus de 100 ans au grand public. La fréquence des émetteurs diffusant l’heure est dérivée d’horloges atomiques et un top de temps est émis régulièrement. Chaque horloge fille accorde sa fréquence et corrige l’heure en admettant un délai de propagation fixe entre l’antenne de l’émetteur et sa propre antenne. Cette correction est simple avec les ondes longues qui suivent la courbure de la terre, mais avec les ondes courtes qui sont reflétées dans l’ionosphère, le délai varie au cours de la journée.
L’émetteur à ondes courtes WWV et l’émetteur à ondes longues WWVB de Boulder, Colorado, sont reçus sur tout le continent américain et codifient l’heure en format IRIG-H. En Suisse, l’émetteur HBG à ondes longues de Prangins, qui diffusait depuis le lac Léman, a été arrêté en 2011 pour des raisons économiques. L’émetteur à ondes longues de Francfort (DCF-77) fonctionne toujours quant à lui et des millions d’utilisateurs de montres et de radios-réveils en profitent, de sorte que son avenir est assuré. Des horloges filles DCF-77 sont présentes dans de nombreux postes électriques. Leur exactitude est au mieux de 100 μs.
Un autre procédé utilise la navigation par satellite. Les satellites de navigation GPS (États-Unis), Glonass (Russie), Beidou (Chine) et Galileo (Europe) transportent des horloges atomiques. Pour estimer le délai de propagation, le récepteur doit déterminer sa position par rapport aux satellites et corriger de nombreux facteurs, en incluant les effets relativistes. Les récepteurs GPS sont intégrés dans de nombreux postes. Cependant, certains ne font pas confiance aux satellites parce que leur signal est intermittent (par exemple dans des vallées profondes ou au grand Nord), les signaux satellites peuvent être falsifiés simplement en les retardant, les satellites peuvent être mis hors service par une tempête solaire ou parce que certains pays n’en veulent pas pour des raisons politiques. [4] Les signaux de temps ont une exactitude d’environ 100 ns.
Aujourd’hui, la plupart des postes ont une horloge locale, ou horloge mère, avec un quartz très stable compensé en température (TCXO) ou tenu à une température constante de quelque 75°C (OCXO), ce qui permet une stabilité de 500 ms/an. Les horloges atomiques au rubidium sont devenues abordables et dérivent de quelque 30 ms/an. Mais pour servir aux synchrophaseurs, elles doivent être resynchronisées fréquemment avec l’heure de référence pour saisir les secondes intercalaires de l’échelle de temps UTC. Il s’agit d’ailleurs d’une raison pour préférer l’échelle de temps TAI (temps atomique international) à UTC.
Le signal des horloges locales est distribué à tous les relais de protection, autrefois sous la forme d’impulsions 1 PPS ou par transmission sérielle au format IRIG-B via un câblage dédié.
Le protocole de distribution du temps de l’Internet SNTP (Simple Network Time Protocol) [5] est requis par la norme IEC 61850 [6] pour synchroniser les appareils intelligents (IED, Intelligent Electronic Devices). Un client SNTP demande l’heure à un serveur de temps synchronisé avec le réseau mondial des horloges atomiques, par exemple ch.pool.ntp.org en Suisse.
Retards
Le retard d’un réseau avec commutation par paquets tel que IP varie plus que celui des ondes radio. Le retard provient non seulement du délai de propagation à travers les lignes, qui est prévisible, mais aussi de la durée de séjour des paquets dans les tampons des multiplexeurs du réseau. Cette latence dépend du trafic et n’est donc pas prévisible.
La correction du retard d’un message à travers le réseau constitue le cœur de SNTP (figure 1).
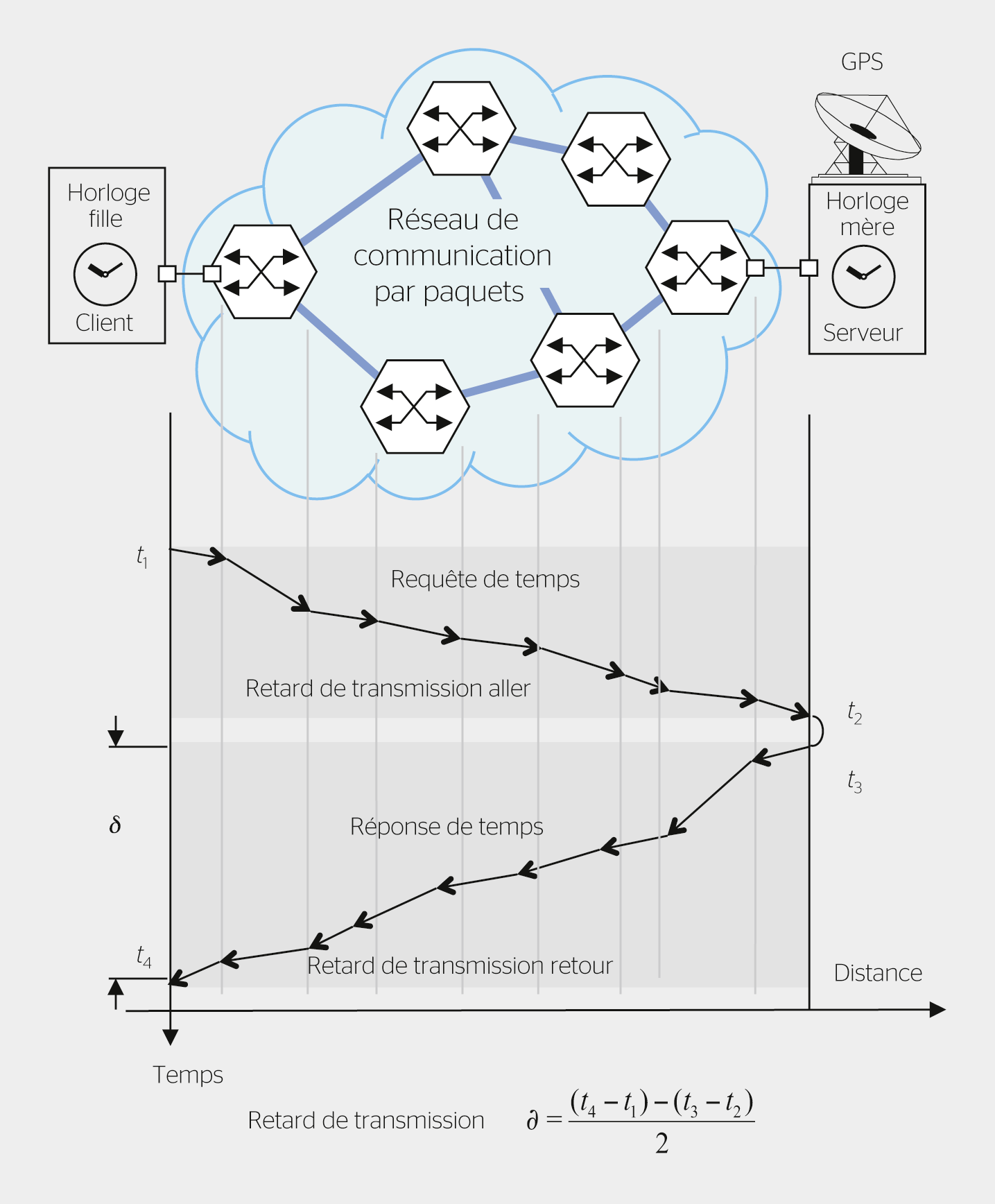
Le client calcule le retard entre le serveur de temps et lui-même par la différence entre le temps t1 d’envoi de la requête et le temps t4 d’arrivée de la réponse du serveur. Le serveur indique dans sa réponse la différence qu’il a mesurée entre le temps t2 d’arrivée de la requête et le temps t3 d’envoi de la réponse. Le client compense l’heure reçue en y ajoutant le retard du message de réponse donné par l’équation énoncée au bas de la figure 1.
Cette méthode exige que la requête et la réponse subissent le même retard. Cela demande que les messages de requête et de réponse prennent le même chemin, que les lignes soient symétriques et qu’il n’y ait pas d’autre trafic. L’exactitude souffre parce que l’horodatage des messages SNTP se fait en logiciel. L’exactitude est limitée à quelques millisecondes à l’intérieur d’un poste et à quelque 10 ms entre postes reliés par un réseau de communication longue distance. Cette exactitude est suffisante pour les perturbographes mais insuffisante pour la protection différentielle ou les synchrophaseurs.
IEEE/CEI 61588
La norme IEEE 1588 [7] «Precision Time Protocol» (PTP), adoptée comme CEI 61588 [8], synchronise via le réseau avec une exactitude mille fois supérieure à celle de SNTP. Elle repose sur la mesure en continu de la contribution au retard total de chaque élément matériel du réseau. Cette norme prévoit que l’horloge mère distribue spontanément et régulièrement le temps, comme le font les stations de radio. On parle donc de mode maître/esclave et non de mode client/serveur comme pour SNTP.
La norme IEEE/CEI 61588 suppose donc que le réseau puisse diffuser simultanément un message aux diverses destinations (broadcast). C’est le cas avec les réseaux locaux tels qu’Ethernet. L’Internet (IP, MPLS) limite pour sa part fortement ce type de diffusion et les réseaux de téléphonie (SDH/SONET) ne le connaissent pas. Par conséquent, cette norme est étroitement liée à Ethernet.
Le PTP offre plusieurs options, seules celles importantes pour la norme CEI/IEEE 61850-9-3 sont décrites ici.
Les différents éléments
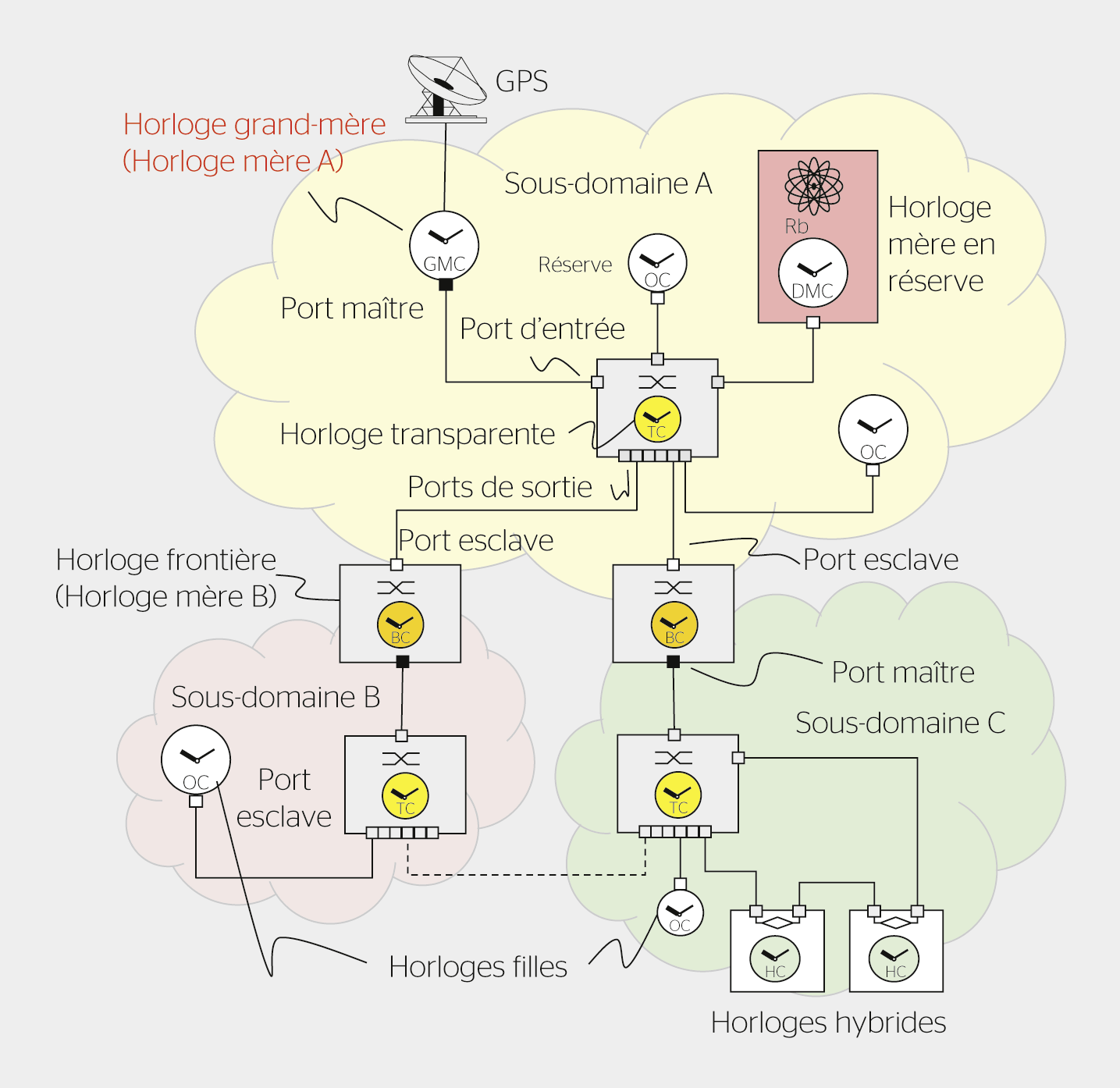
La distribution de temps comprend les éléments suivants (figure 2):
- GMC ou «Grandmaster Clock»: horloge grand-mère qui sert de référence pour tout le domaine temporel;
- MC «Master Clocks»: horloges mères qui servent de référence à un sous-domaine;
- OC «Ordinary Clocks»: horloges filles ne synchronisant pas d’autre horloge;
- TC «Transparent Clocks»: horloges de transit non synchronisées reliant les éléments du réseau;
- BC «Boundary Clocks»: horloges frontières entre sous-domaines, synchronisées par une MC;
- HC «Horloges hybrides»: à la fois TC et OC.
Une horloge mère (MC) distribue un message de synchronisation (Sync) qui contient deux champs: le temps de l’horloge locale MC et un temps de correction indiquant le délai entre la lecture de l’horloge locale et le moment de la transmission du message, comme le montre la figure 3.
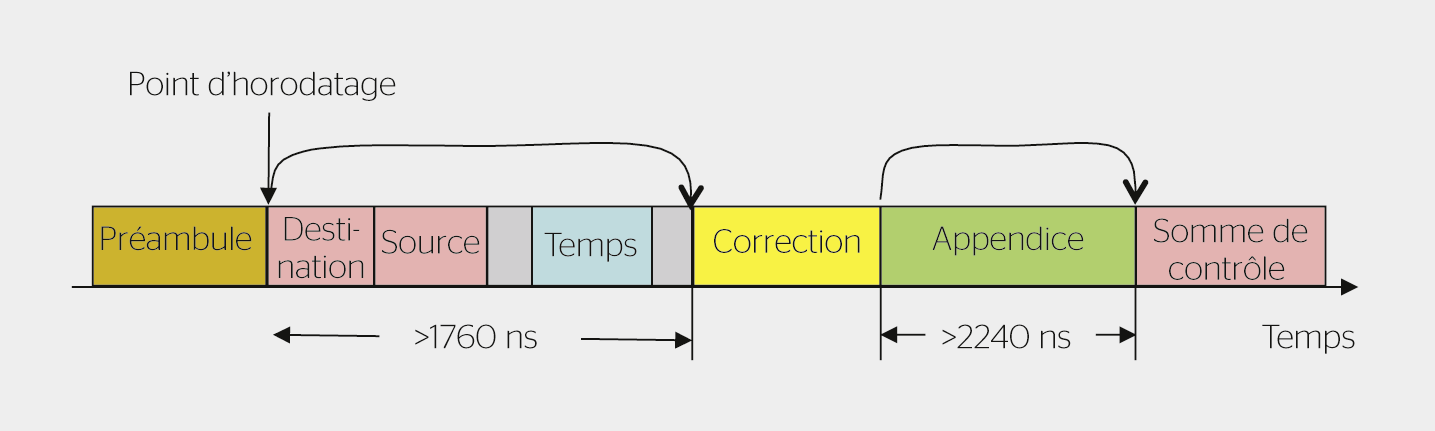
Pour ce faire, la MC doit connaître le moment exact de la transmission de la trame et modifier la trame durant la transmission. L’émetteur-récepteur Ethernet (PHY) analyse les trames et génère un signal précis lorsqu’il détecte le point de synchronisation après le préambule. À 100 Mbit/s, une horloge n’a que 1760 ns pour calculer la correction et remplacer l’ancienne valeur. Ensuite, il lui reste 2240 ns pour calculer la somme de contrôle qui clôt la trame. Cette substitution «en vol» lors de la transmission, que PTP appelle 1-step pour «correction en une étape», exige donc un matériel rapide.
Pour simplifier le matériel, PTP permet une «correction en deux étapes» dans laquelle le champ de correction est envoyé dans un message suivant, le Follow_Up. La précision reste la même, seul le trafic augmente un peu.
Plusieurs MC peuvent être actives simultanément dans un même sous-domaine. Un algorithme choisit alors celle ayant la meilleure précision.
Les horloges transparentes (TC) dans les passerelles (IEEE 802.1D [9]) relayent – et modifient – les messages PTP. Elles ont donc plusieurs ports.
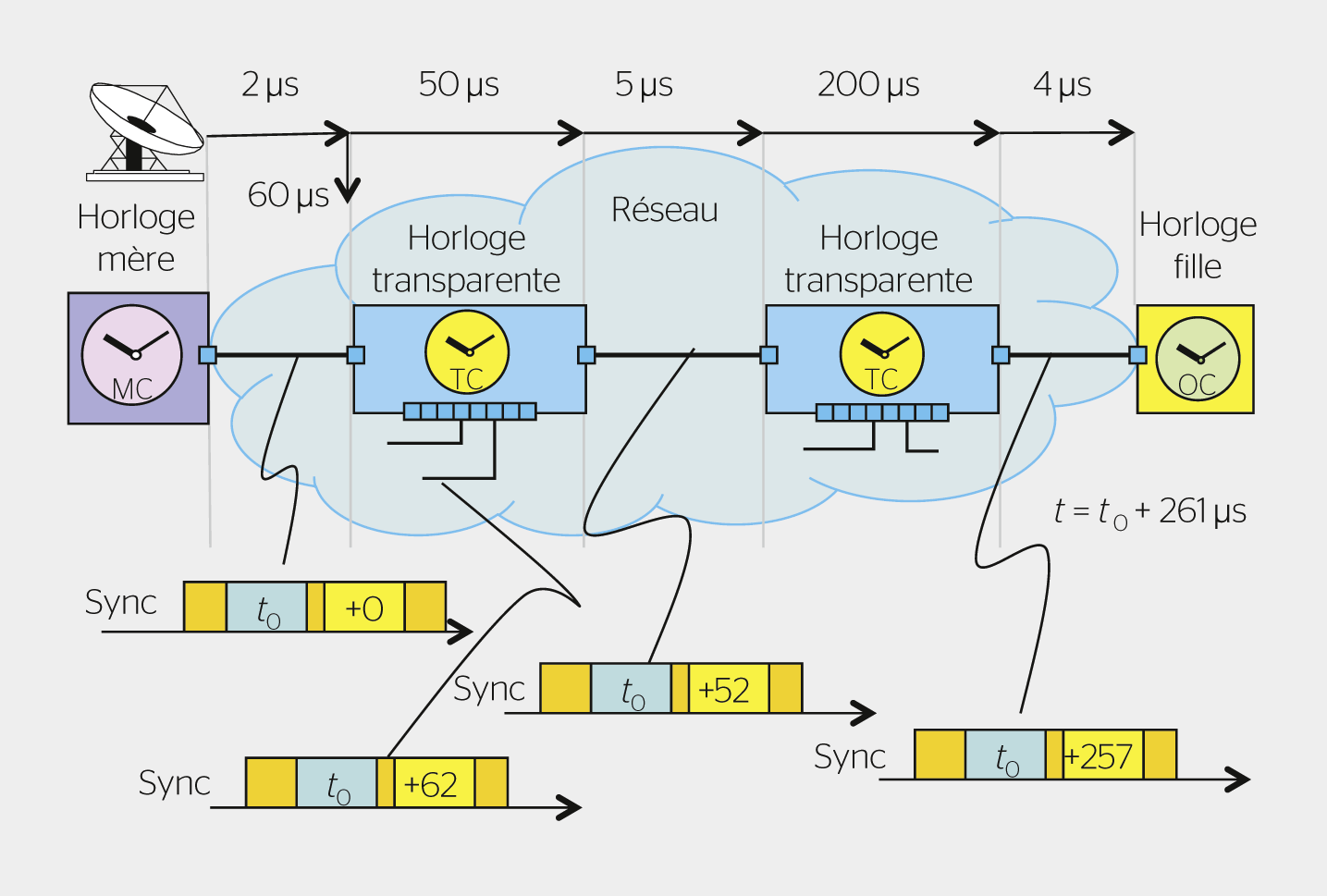
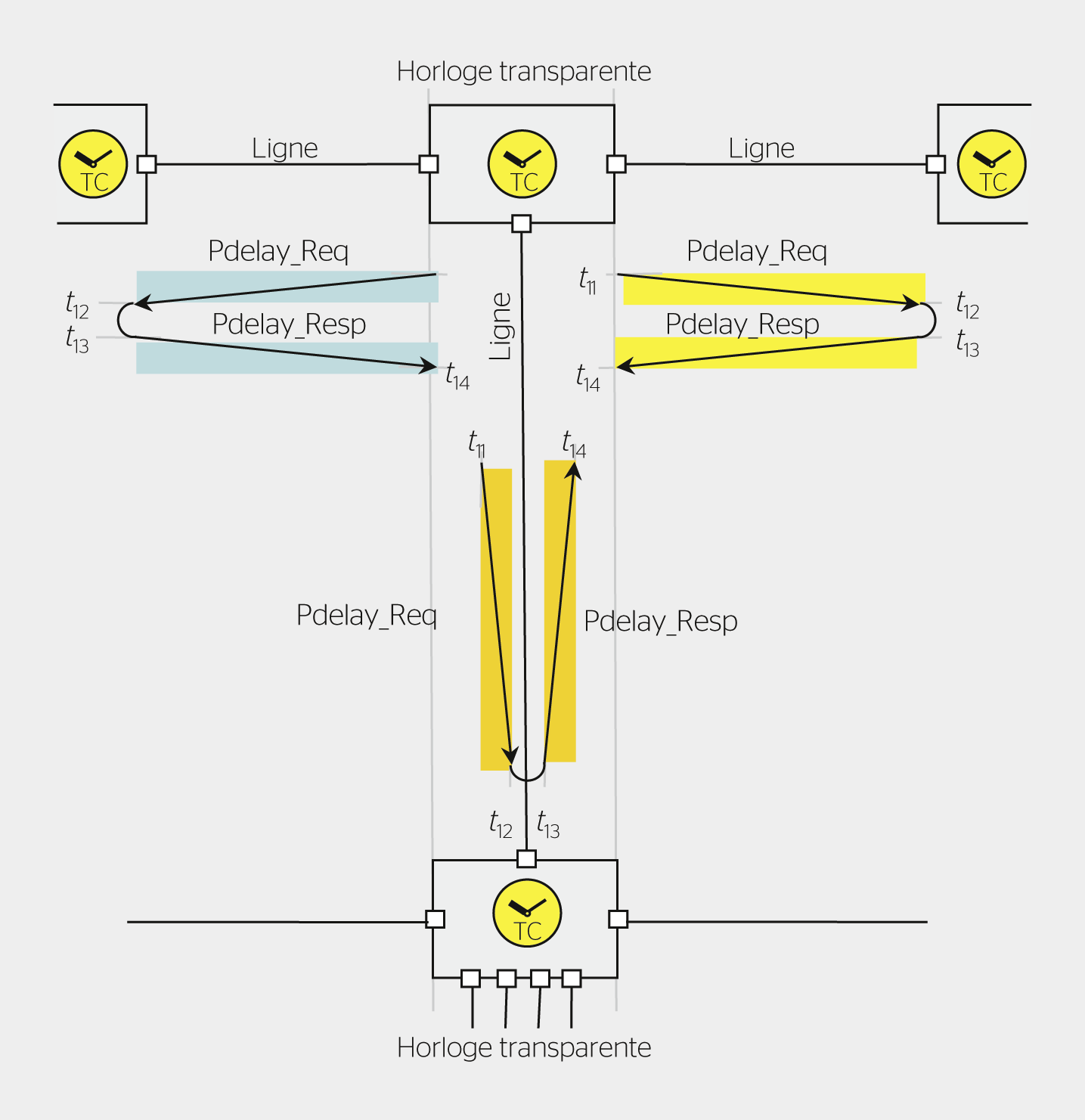
Quand une TC reçoit un Sync par le port en amont, elle le copie vers tous les ports actifs en aval, en ajoutant à la valeur du champ de correction reçu le retard de séjour du port aval et le retard de ligne du port amont, comme le montre la figure 4. Les TC utilisent leur horloge locale pour horodater les messages en entrée et en sortie (figure 5).
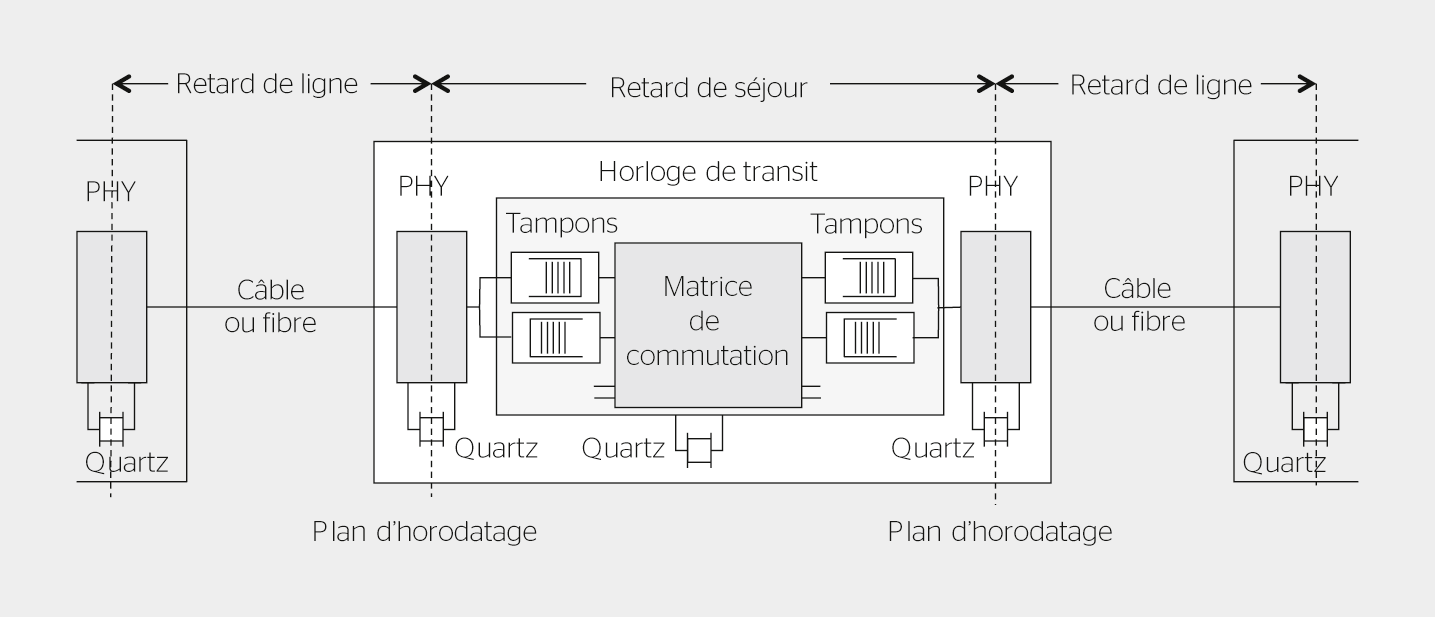
Les TC calculent le retard de ligne en envoyant sur tous leurs ports une requête (Pdelay_Req) à laquelle leurs voisins répondent par une réponse (Pdelay_Resp). Ceci s’applique aussi aux ports fermés par le protocole d’arborescence RSTP. Pdelay_Req et Pdelay_Resp ne sont jamais relayés, ils ne sont échangés qu’entre deux ports sur une seule ligne (figure 6). Une passerelle qui ne connaît pas PTP sera identifiée, car elle ne répondra pas. La correction en deux étapes s’applique également au Pdelay_Resp, sous la forme d’un Pdelay_Resp_Follow_Up.
Les TC appliquent la même équation que SNTP, mais la précision est bien meilleure que celle de SNTP, car seul le délai de propagation du signal à travers une fibre optique ou une paire torsadée est mesuré, et ce, par un horodatage des messages dans le matériel. On suppose que le délai de propagation est le même dans les deux sens ou qu’une différence fixe puisse être compensée. Les convertisseurs entre paires torsadées et fibre optiques doivent donc être construits avec un retard constant et identique dans les deux sens.
PTP spécifie aussi les horloges frontières BC, à l’origine les seules horloges de la norme IEEE 1588 v1 avant que les avantages des TC ne deviennent évidents. Une BC possède plusieurs ports et une horloge locale synchronisée par le port connecté à l’horloge mère dans le domaine amont. L’horloge frontière sert d’horloge mère pour tous ses autres ports. Les BC ne relayent pas le Sync reçu, mais émettent leur propre Sync avec leur propre période dans leur sous-domaine. Les BC séparent donc les sous-domaines et forment une hiérarchie d’horloges, avec la GMC au sommet. Cette dernière est synchronisée par la référence (par exemple GPS ou une horloge atomique).
Les BC offrent une précision moindre que celle des TC parce qu’une chaîne d’horloges en série a tendance à l’instabilité. En revanche, une BC peut, en cas de perte du signal de la GMC, devenir elle-même GMC et continuer à synchroniser ses domaines.
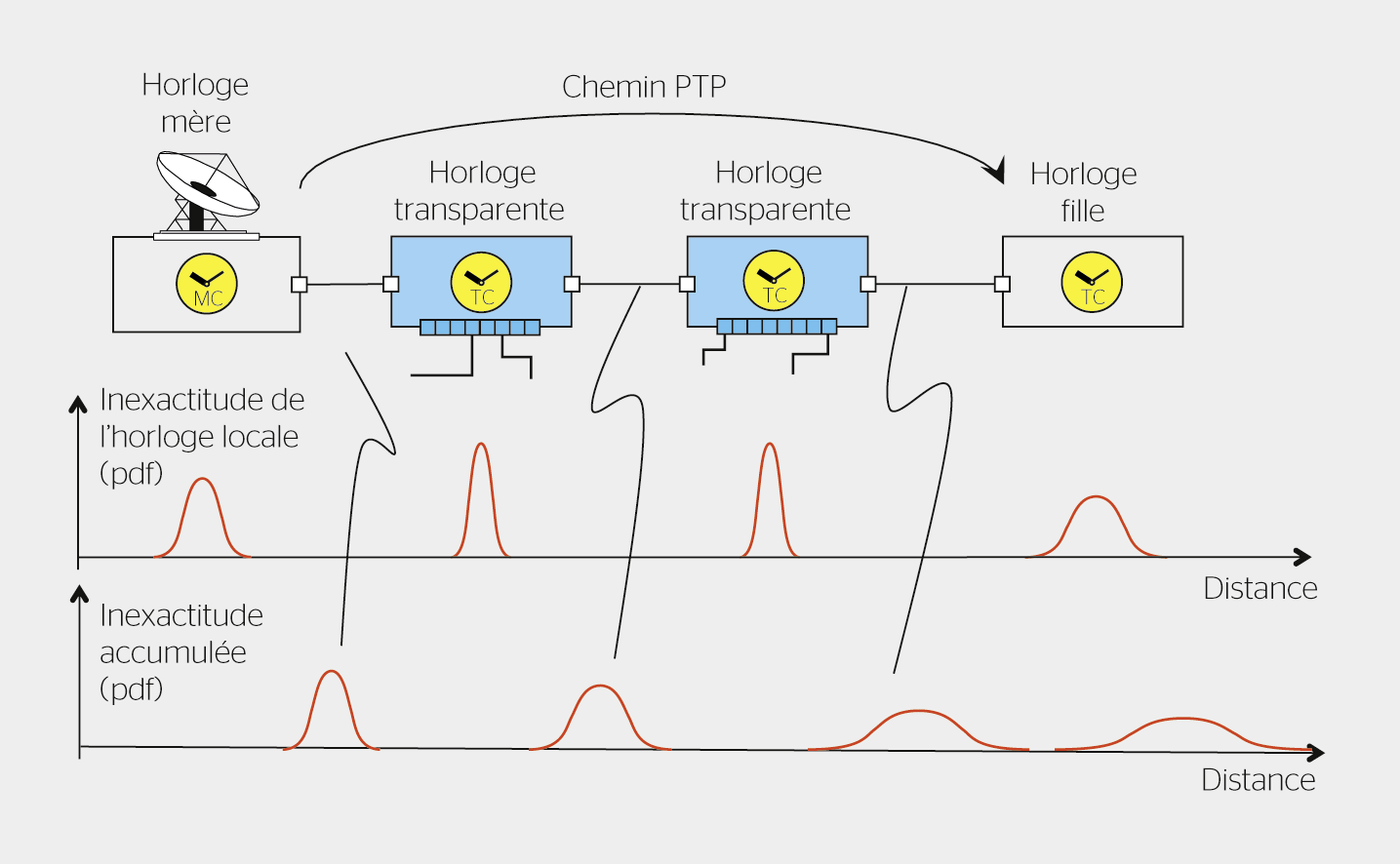
Précision d’horloges en série
Chaque horloge d’une chaîne introduit une inexactitude. La précision d’une horloge mère dépend de la qualité du temps de référence et de la stabilité de son oscillateur.
Chaque TC ajoute une imprécision parce que l’horodatage est obtenu à partir d’un oscillateur à quartz ayant une fréquence finie. Il y a aussi plusieurs cristaux, généralement un par port, qui introduisent une erreur de quantification.
L’imprécision augmente avec le nombre d’horloges en série, comme le montre la figure 7.
Distribution horaire aux postes électriques
La référence de temps provient du réseau de communication longue distance (WAN ou Wide Area Network), par exemple SDH/SONET, IP ou MPLS. Dans la figure 8, la synchronisation est assurée par une horloge principale et au moins une horloge de secours, par exemple une horloge atomique au rubidium.
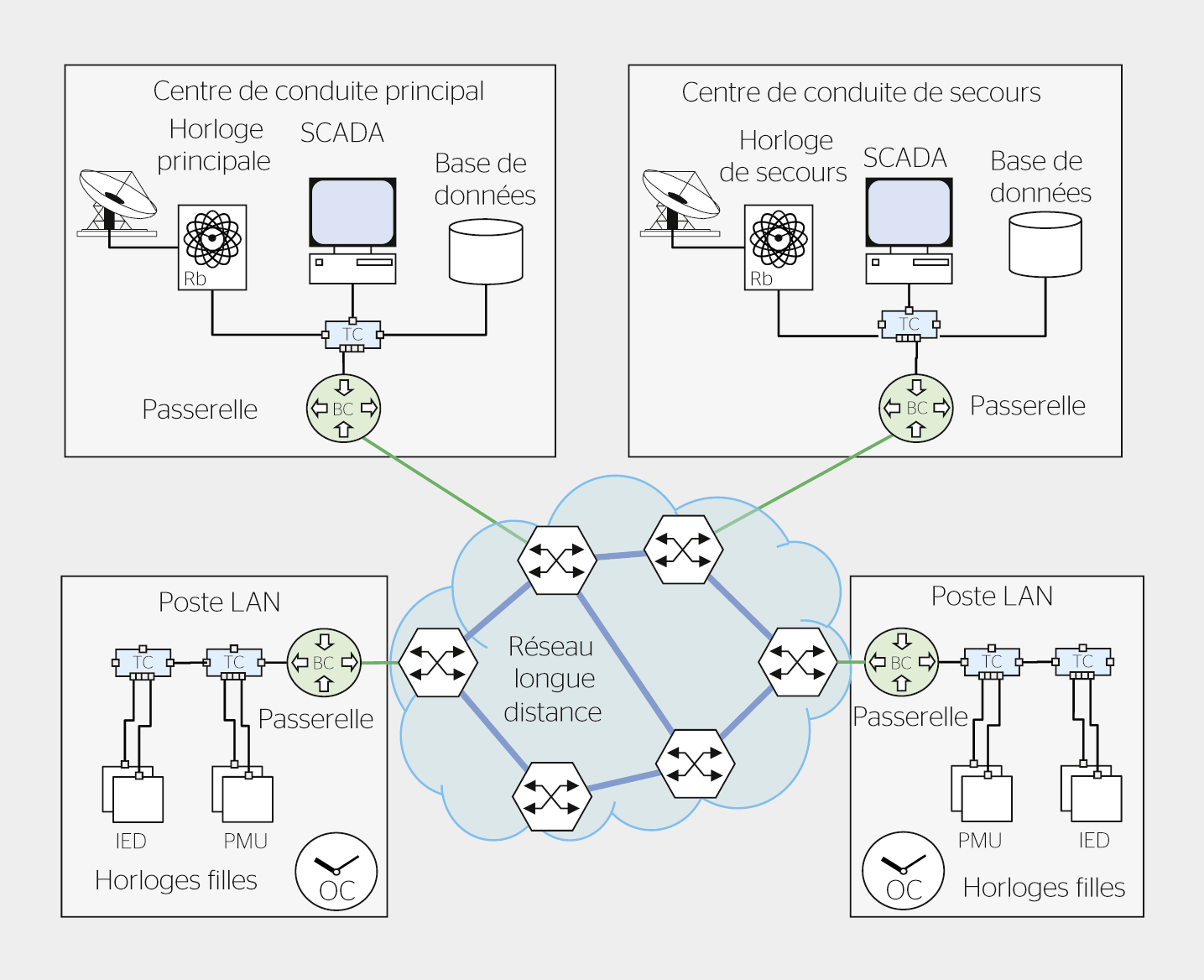
La figure 9 montre la distribution horaire dans un poste électrique. L’horloge mère est synchronisée au WAN. Une connexion GPS sert de secours et de contrôle de plausibilité. Les MC génèrent également des signaux 1 PPS avec lesquels la qualité de la synchronisation peut être vérifiée lors de la mise en service.
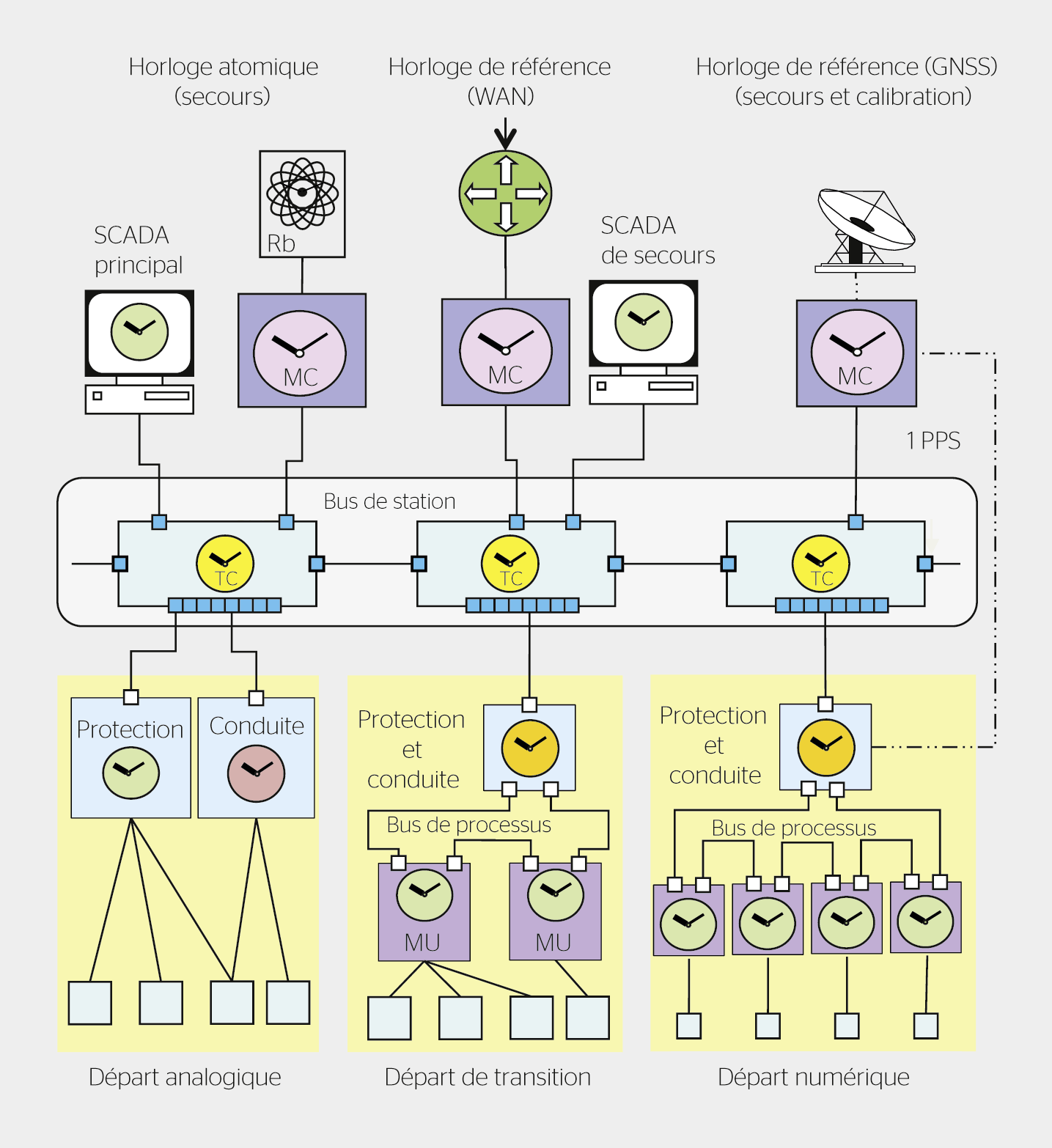
La figure 9 montre à gauche un départ classique avec capteurs analogiques, à droite un départ avec capteurs numériques et au milieu un départ de transition avec une «unité de mélange» (MU) qui numérise les valeurs analogiques des capteurs analogiques et les empaquètent en trames selon la norme CEI 61850-9-2.
La norme CEI/IEEE 61850-9-3
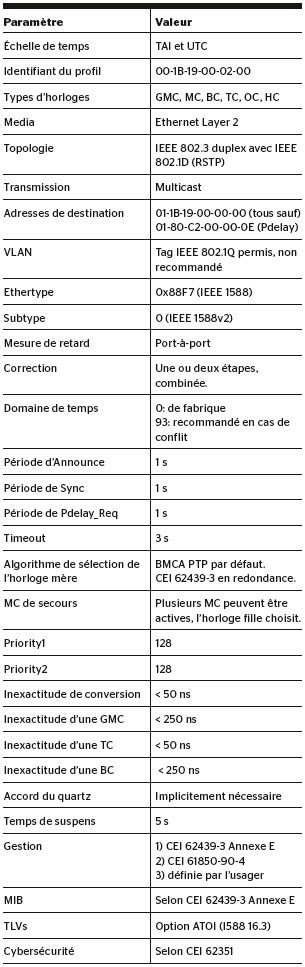
La norme CEI/IEEE 61588 (PTP) offre de nombreuses options, par exemple la correction en une ou deux étapes, la mesure du retard de bout en bout ou de port à port, ou encore la transmission sur couche 2 ou couche 3. Par contre, elle ne caractérise pas la précision.
Le groupe de travail 10 du Comité Technique 57, en collaboration avec le groupe de travail 15 du SC 65C et le groupe PSRC de l’IEEE ont spécifié un profil de la norme CEI/IEEE 61588 qui répond aux exigences des postes et des réseaux électriques intelligents. La norme CEI/IEEE 61850-9-3 [10] offre une précision de 1 μs en bout d’une chaîne de 15 TC. La norme fournit une redondance sans faille conformément à la norme CEI 62439-3.
Bien que non spécifié dans la CEI/IEEE 61850-9-3, la norme CEI/IEEE 61850-9-3 peut être appliquée à tous les réseaux basés sur Ethernet, y compris MPLS et Ethernet Metro.
Le tableau ci-dessous en montre les principaux paramètres.
Sûreté de fonctionnement
Les systèmes d’automatisation des postes exigent une haute disponibilité. Pour ce faire, le réseau local LAN est dupliqué. La norme CEI 61850 spécifie d’appliquer la norme CEI 62439 [11], en particulier le Protocole de Redondance Parallèle (PRP). Le principe de PRP repose sur le fait que chaque nœud final est relié à deux réseaux locaux séparés, totalement indépendants, opérant en parallèle. Un tel nœud à double attache envoie le même message sur les deux réseaux locaux en même temps. Un nœud de réception accepte le premier message reçu et rejette le doublon.
La figure 10 montre le principe de PRP lorsqu’une MC envoie une synchronisation à une OC. Le principe PRP de rejet des doublons ne convient pas ici parce que le retard dans les deux réseaux est différent et donc les champs de correction ne sont pas identiques. Avec une correction à 2 étapes, il serait difficile d’associer le Sync avec son Follow_Up. Un nœud traite donc les deux ports individuellement. Accepter les Sync des deux ports pour la synchronisation de l’horloge locale introduirait une gigue dans la boucle de réaction de l’oscillateur local. Un nœud n’écoute donc qu’un seul port et surveille l’autre port pour détecter les erreurs du chemin passif et pour contrôler la plausibilité.
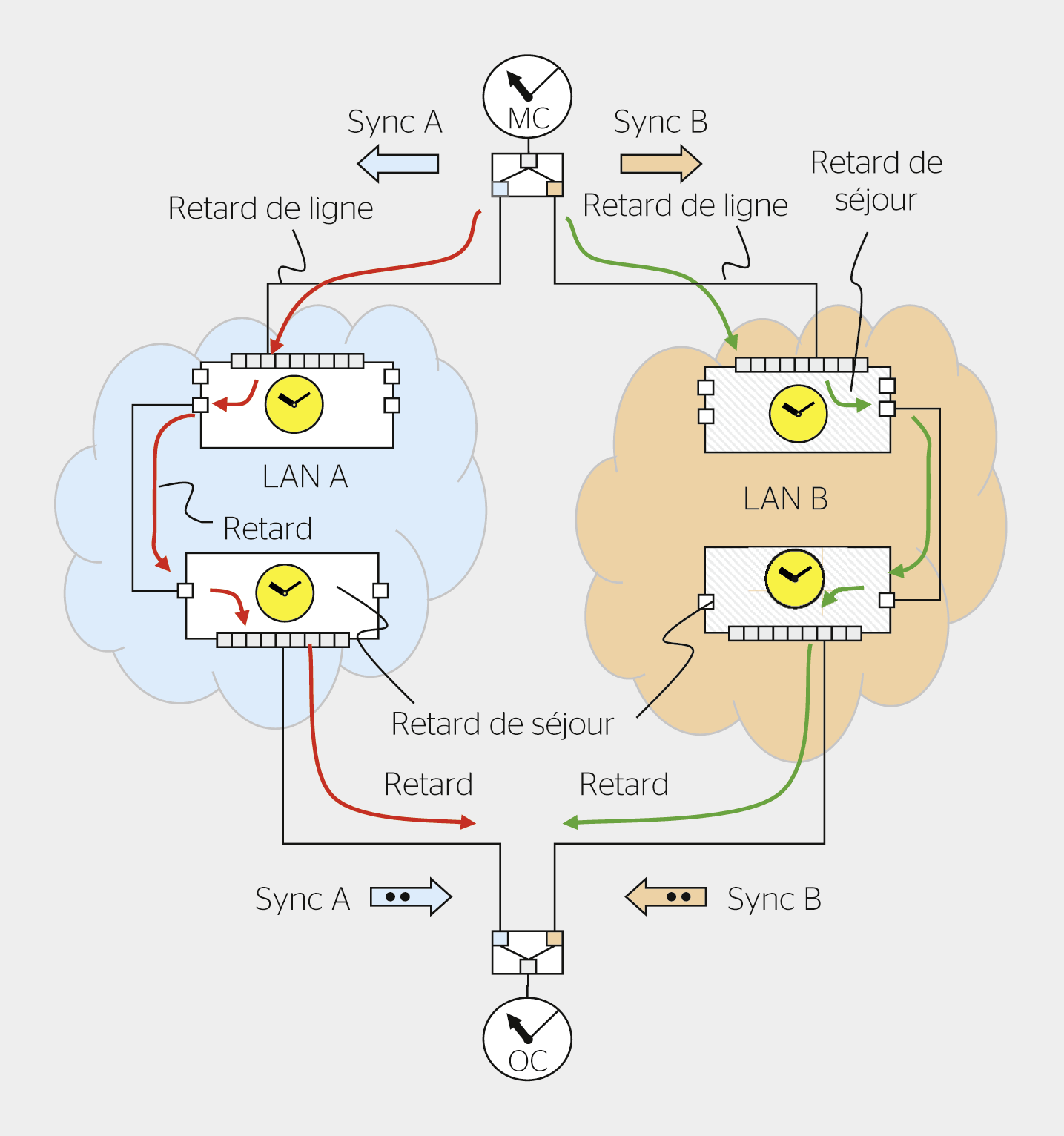
Par conséquent, la norme CEI 62439-3 Annexe A modifie le principe PRP exclusivement pour les messages PTP. Une OC traite une même MC, qu’elle voit par les réseaux locaux A et B, comme étant deux horloges différentes et applique l’algorithme «meilleure horloge» pour sélectionner un port. Comme l’identité de la GMC est la même sur les deux réseaux locaux, l’horloge fille utilise la qualité de temps pour sélectionner le meilleur port, par exemple celui avec la correction la plus faible ou avec le moindre nombre de BC en chemin. Si plusieurs MC sont actives simultanément dans un réseau local, chaque OC choisit sa meilleure MC. Bien que cela augmente peu la disponibilité, cette diversité permet de vérifier la cohérence de la distribution du temps, par exemple pour se protéger contre les cyberattaques.
La norme CEI 62439-3 applique ce principe à HSR (High-availability Seamless Redundancy, un protocole de redondance pour les réseaux Ethernet), comme le montre la figure 11. Au sein de l’anneau HSR, la synchronisation fonctionne dans les deux sens et chaque nœud HSR ajuste le champ de correction. Comme les messages de synchronisation corrigés ne sont pas des doublons, ils sont retirés de l’anneau par le nœud qui les a introduits. Chaque nœud sélectionne sa synchronisation à partir d’une direction particulière et l’autre direction est utilisée pour vérifier le chemin.
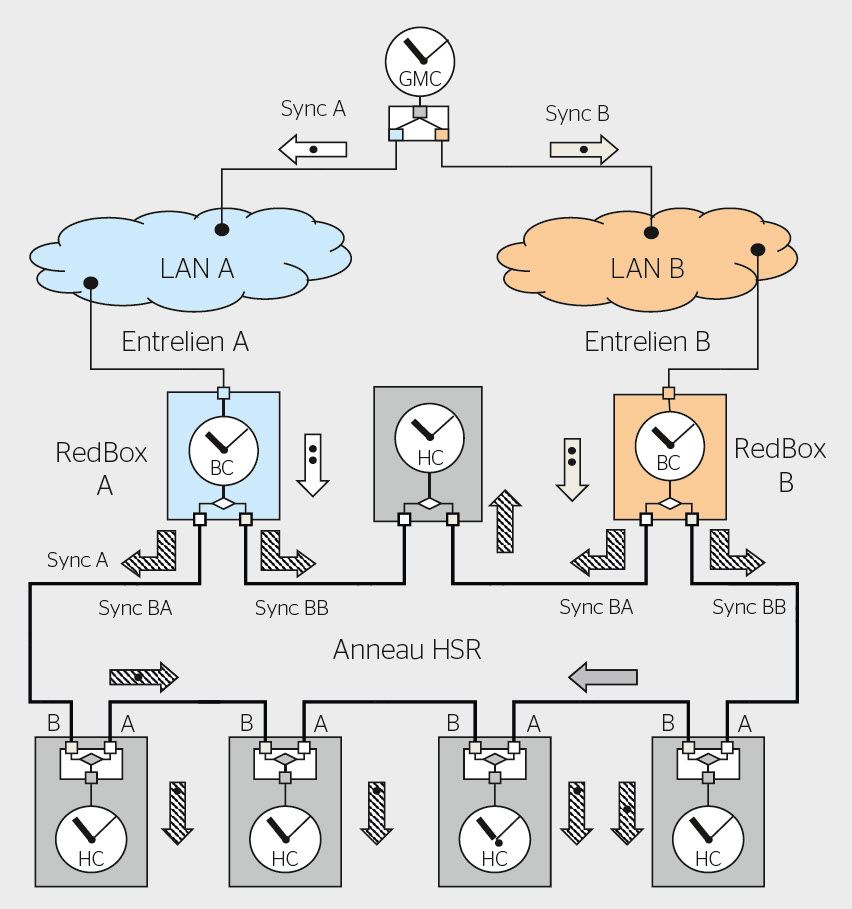
Un anneau HSR peut être connecté à un réseau double PRP par une paire de RedBox. C’est le cas si le bus de station [6] travaille avec PRP et le bus de processus [12] avec HSR. Dans ce cas, quatre messages de synchronisation circulent dans l’anneau, mais ce trafic additionnel est insignifiant.
Conclusion
Les normes CEI/IEEE 61850-9-3 et CEI 62439-3 permettent une distribution horaire très exacte et hautement disponible qui répond aux exigences les plus sévères des réseaux électriques intelligents. Cette synchronisation permet d’autres services, tels que la transmission déterministe de valeurs échantillonnées.
En novembre 2015, à Bruxelles, plusieurs fabricants ont effectué un test d’interopérabilité des horloges en redondance avec succès. La voie est ouverte pour l’utilisation opérationnelle.
La version allemande de cet article est parue dans le Bulletin SEV/AES 5/2017 et est également disponible en ligne.
Ceci pourrait également vous intéresser

