À la conquête du véhicule autonome
Formation des ingénieurs au transport de l’avenir
Débuté fin 2017, le projet de grande ampleur Sh@ttle vise à transformer un véhicule de série en voiture autonome. Les futurs ingénieurs en technique automobile de la Haute école spécialisée bernoise unissent leurs efforts pour développer l’une des nouvelles plateformes d’enseignement phare de leur école.

L’automatisation de nos moyens de transport n’a rien de nouveau. Elle a débuté le siècle passé avec les premiers systèmes d’assistance à la conduite tels que l’ABS ou la régulation de vitesse. Dès lors, le nombre de systèmes d’aide n’a cessé de croître et leurs combinaisons ont permis d’atteindre un niveau dit d’«automatisation partielle». Ce niveau d’automatisation assiste et facilite les choix du pilote, mais oblige celui-ci à rester concentré sur la conduite du véhicule en permanence.
Il était jusqu’ici relativement aisé de former les étudiants en ingénierie automobile à ces systèmes, car la logique derrière ces assistances restait proche du système initial non-assisté électroniquement. Toutefois, avec l’apparition récente des premiers prototypes de véhicules proposant une automatisation dite «conditionnelle» – le conducteur doit être prêt à reprendre le contrôle du véhicule en tout temps, mais il peut parfois laisser le véhicule conduire de façon autonome dans un environnement prédéfini –, il est devenu beaucoup plus complexe de fournir un enseignement pratique aux ingénieurs de demain. Cette révolution automobile nécessite de faire appel à des principes poussés tels que le «deep learning», la technologie «drive-by-wire», la gestion des priorités dans le transfert d’informations ou encore la récolte de grande quantité de données.
C’est pour pallier cette dangereuse lacune dans l’enseignement que Peter Affolter, professeur d’électronique du véhicule à la Haute école spécialisée bernoise (BFH), a imaginé une plateforme de développement et d’apprentissage unique: le projet Sh@ttle.
Gestion électrique de tous les éléments
La première étape a consisté à trouver un véhicule dont la mécanique et la gestion étaient suffisamment simples et transparentes pour être facilement compréhensibles et transformables. En l’occurrence, c’est le modèle «Twizy» de Renault qui a été retenu. Son seul défaut majeur: le peu de place qu’il offre pour la panoplie impressionnante de capteurs, d’actionneurs et d’unités de gestion nécessaires à la conduite autonome.
Pour permettre au véhicule de se mouvoir de manière entièrement autonome, il a fallu ensuite rendre contrôlables électriquement tous les dispositifs nécessaires à la marche du véhicule. Dans le cas d’une Renault Twizy de série, la majorité des dispositifs sont déjà gérés par l’électronique (contrôle de la pédale d’accélération, commande de l’éclairage et de la signalisation, etc.). Deux systèmes importants ne sont néanmoins pas équipés d’une commande électrique: le système de direction et le système de freinage. Un moteur de direction EPAS (Electric Power Assisted Steering) a donc été installé sur la colonne de direction et un actionneur linéaire a été utilisé pour actionner la pédale de frein. Il est important de noter que bien que le véhicule soit automatisé, il doit toujours pouvoir être conduit par un pilote humain. Les freins et le système de direction restent donc des systèmes fonctionnant également par commande mécanique.
Une unité de contrôle pour la coordination
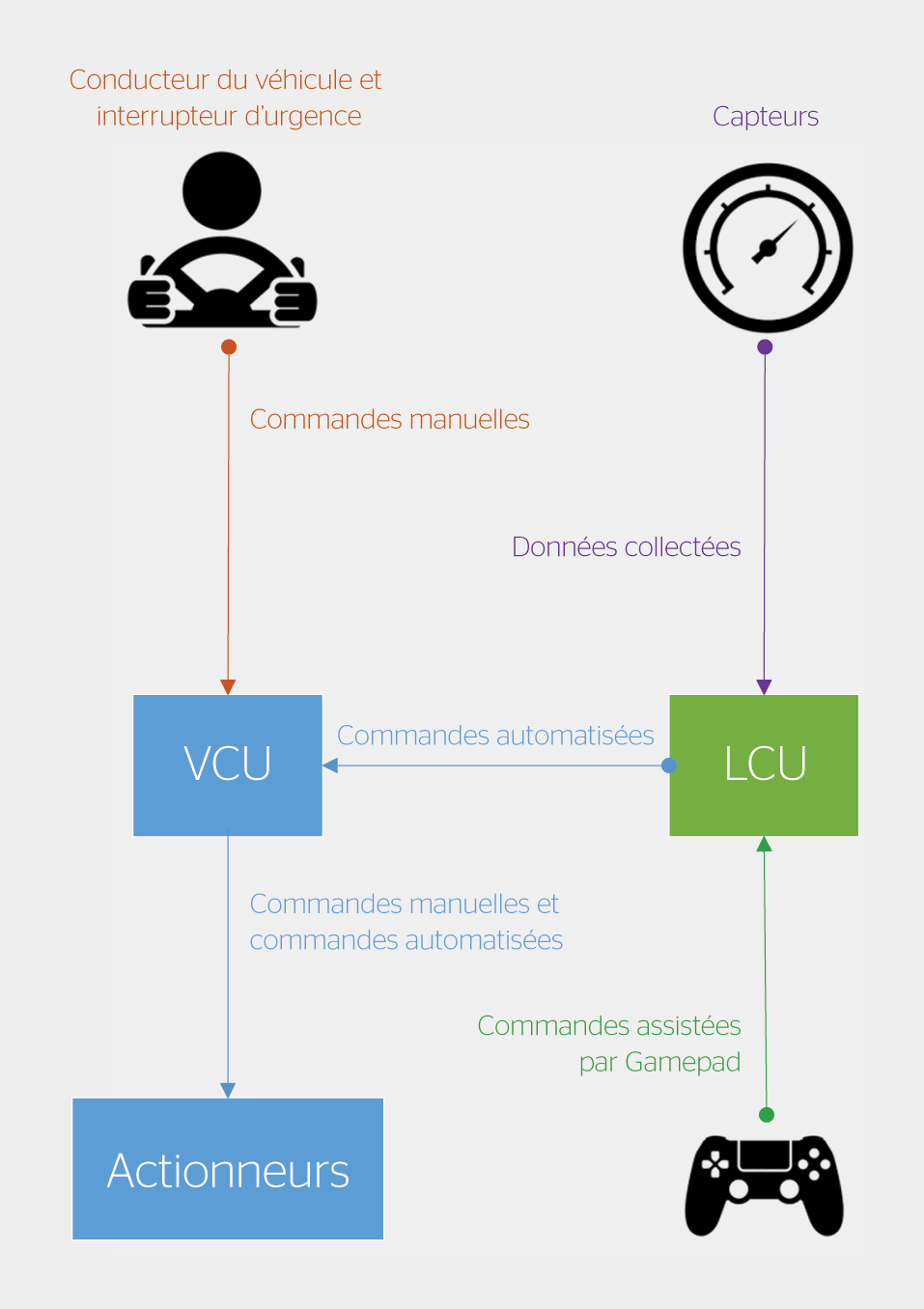
Il s’agit ensuite de mettre en place un système de commande de tous les actionneurs du véhicule: le VCU (Vehicle Control Unit). Celui-ci récoltera toutes les requêtes de modification de l’état des actionneurs, qu’elles proviennent de l’intelligence artificielle de Sh@ttle ou d’un pilote humain, et coordonnera ces informations ainsi que leurs ordres d’exécution. Le VCU permet également de servir d’interface entre les ordres formulés par l’intelligence artificielle et les actionneurs, qui ne communiquent pas toujours sur des bus CAN (Controller Area Network) ayant la même vitesse de transmission. En cas de problème, un bouton de reprise de contrôle d’urgence permet au VCU de bloquer entièrement les commandes de l’intelligence artificielle pour rendre le contrôle complet du véhicule au pilote humain.
D’automatisé à autonome
La prochaine étape consiste à comprendre d’où proviennent les commandes transmises au VCU utilisées pour permettre la conduite autonome. Elles sont toutes communiquées via le bus CAN par le LCU (Logical Control Unit), qui agit comme le «cerveau» de Sh@ttle. Le LCU est un puissant ordinateur équipé du système d’exploitation Linux et utilisant les outils ROS (Robot Operating System).
Une question se pose alors: «Comment le LCU peut-il prendre des décisions lui permettant de conduire de manière autonome?» À l’heure actuelle, ces décisions sont simulées par une manette de contrôle (également appelée «gamepad»). Il est ainsi possible de commander le véhicule et de tester le fonctionnement du reste du système. Il est donc correct de dire qu’actuellement, Sh@ttle est «automatisé», mais pas encore «autonome».
Pour rendre ce véhicule autonome, la méthode de développement suivante va être mise en place: de la même manière que le cerveau humain utilise les sens de son corps pour obtenir des informations sur son environnement proche et pouvoir ainsi s’y mouvoir sans encombre, le LCU utilise les capteurs installés sur le véhicule pour recréer une image virtuelle précise de son environnement proche, à 360°. La quantité gigantesque d’informations collectées en temps réel permettra au LCU de prendre des décisions sur la trajectoire ou la vitesse de Sh@ttle.
Entraîner l’intelligence du véhicule
Le passage de l’information de l’état brut à une commande pour le véhicule est sans nul doute la partie la plus complexe du processus. Il est dans un premier temps possible d’implémenter de petites automatisations permettant au véhicule d’effectuer des routines simples (comme suivre une ligne au sol). La caméra de Sh@ttle effectue aussi un prétraitement des données permettant la reconnaissance d’obstacles ou l’adaptation de la vitesse aux panneaux de signalisation.
Une fois ce stade d’automatisation atteint, les progressions du projet devront être obtenues à l’aide du «deep learning». La mise en place d’un algorithme performant permettant au véhicule d’adapter son comportement aux différents éléments rencontrés de manière aléatoire, est une tâche beaucoup plus complexe. Cette méthode va permettre à la machine d’apprendre comment réagir seule en présence de différents cas, sans avoir à programmer manuellement chaque détail.
Pour commencer, un grand nombre d’images représentant un obstacle (par exemple un arbre) va être soumis à un algorithme très complexe, mais pas encore optimisé. Ces images seront montrées à l’algorithme tout en indiquant ce qu’elles représentent. Cet algorithme fonctionne à la manière d’un réseau de neurones, chaque neurone ayant un critère à examiner et à pondérer en fonction de son importance. Ainsi, la présence d’un tronc d’arbre sera pondérée avec plus d’importance pour différencier un arbre des autres obstacles que la couleur de l’obstacle, qui elle peut varier en fonction de l’espèce. Au fur et à mesure que cette grande quantité d’images sera présentée à Sh@ttle, les paramètres et la pondération accordée à chacun des critères de son algorithme pourront s’adapter.
Il s’ensuit une phase de test au cours de laquelle un nouveau stock d’images sera présenté à l’algorithme. Cette fois-ci, ce sera à Sh@ttle de définir si ses images correspondent à des arbres grâce aux réglages effectués précédemment. À la fin de ce test, le taux de réussite sera mesuré et l’algorithme pourra être adapté afin de ne pas commettre les mêmes erreurs à l’avenir. C’est cette méthode qui pourra être utilisée pour entraîner l’intelligence du véhicule. Afin de ne pas prendre le risque de l’endommager, une version similaire de Sh@ttle a été développée virtuellement à l’aide de l’ensemble d’outils informatiques ROS. Il est ainsi possible de faire évoluer un véhicule virtuel, équipé des mêmes capteurs que le prototype physique, dans un monde virtuel afin de lui permettre d’entraîner son algorithme à un environnement similaire au monde réel.
Une panoplie de capteurs pour la collecte de données
Les données collectées pour les prises de décisions du véhicule sont issues de quatre capteurs principaux. Il arrive que ces données soient redondantes. Ceci a principalement pour but d’assurer la sécurité du véhicule en cas de défaillance de l’un des capteurs. Cette répétition s’avère également utile pour prévenir d’éventuelles attaques à l’encontre du véhicule. Il est potentiellement facile de mettre un capteur hors d’état de fonctionner, et cela ne doit pas être un motif de panne directe.
La caméra Mobileye est installée sous le pare-brise du véhicule. Elle observe donc uniquement l’environnement qui fait face au véhicule. Une puce de traitement d’image EyeQ2 est intégrée au système et analyse les images en temps réel. La forte plage de détection permet de repérer un véhicule à 150 m de distance en plein jour (90 m durant la nuit). Les piétons sont quant à eux détectables à 40 m. L’analyse automatique de la caméra permet de différencier les objets mouvants parmi les objets repérés, d’en transmettre la distance ainsi que de les identifier.
Le capteur Lidar 3D Velodyne Puck VLP-16 mesure avec une portée de 100 m jusqu’à 300'000 points par seconde, avec un angle de 360°. Positionné sur le toit du véhicule, il permet d’établir une image précise de l’environnement tout autour du véhicule.
Le radar Delphi permet de repérer les obstacles se trouvant face au véhicule avec une portée allant jusqu’à 174 m et un angle de vue de 10°. Un second faisceau offre un meilleur angle d’ouverture (jusqu’à 45°) au détriment de la portée (env. 60 m). Ces informations cumulées aux informations collectées par le capteur Lidar et la caméra offrent une redondance d’informations assurant que le véhicule repère tout obstacle en face de lui et puisse convenablement s’y adapter. Un autre point important: le radar contient également un accéléromètre 3 axes permettant d’établir une régulation de la dynamique du véhicule. Il sera ainsi possible d’adapter les commandes automatiques du véhicule afin de rendre ses mouvements fluides et agréables pour les passagers.
Le GPS est indispensable: il est en effet primordial de pouvoir également localiser la position exacte du véhicule afin d’être en mesure de le repérer précisément. Ces données sont essentielles à l’établissement des itinéraires de conduite ainsi qu’au contrôle de la trajectoire générale du véhicule.

Une plateforme d’apprentissage avant tout
Sh@ttle est développé en premier lieu en tant que plateforme d’apprentissage. Son développement ne suit donc pas un but commercial. Il permettra de tester le fonctionnement de nouveaux capteurs qui pourront être ajoutés au système actuel, de comparer les performances de différents produits offrant des prestations théoriquement similaires, ou encore simplement d’améliorer l’algorithme de conduite autonome. Cette plateforme d’apprentissage a pour vocation de rester parmi les étudiants durant de nombreuses années et de s’adapter ainsi à l’évolution perçue dans le monde du véhicule autonome.
Ceci pourrait également vous intéresser

